Gain related parameters (continued) – Yaskawa MP940 Reference Manual User Manual
Page 265
MotionSuite™ MP940 Machine Controller Reference Manual
SGDH User Parameters
6-65
Pn105
2nd Speed Loop Inte-
gral Time Constant
0.01ms
15 ~
51200
—
2000
Speed
Torque
Position
Pn106
2nd Position LoopGain
1/s
1 ~ 2000
—
40
Position
Pn107
Bias
r/min
0 ~ 450
Use this user parameter when using in
connection with the MP940.
0
Position
Pn108
Bias Width Addition
Com-
mand Unit
0 ~ 250
Use this user parameter when using in
connection with the MP940.
7
Position
Pn109
Feed Forward
%
0 ~ 100
Use this user parameter when using in
connection with the MP940.
0
Position
Pn10A
Feed Forward
Filter Time Constant
0.01ms
0 ~ 6400
Use this user parameter when using in
connection with the MP940.
0
Position
Pn10B
Gain-related
Application
Switches
0
Mode
Switch
Selection
(0 ~ 4)
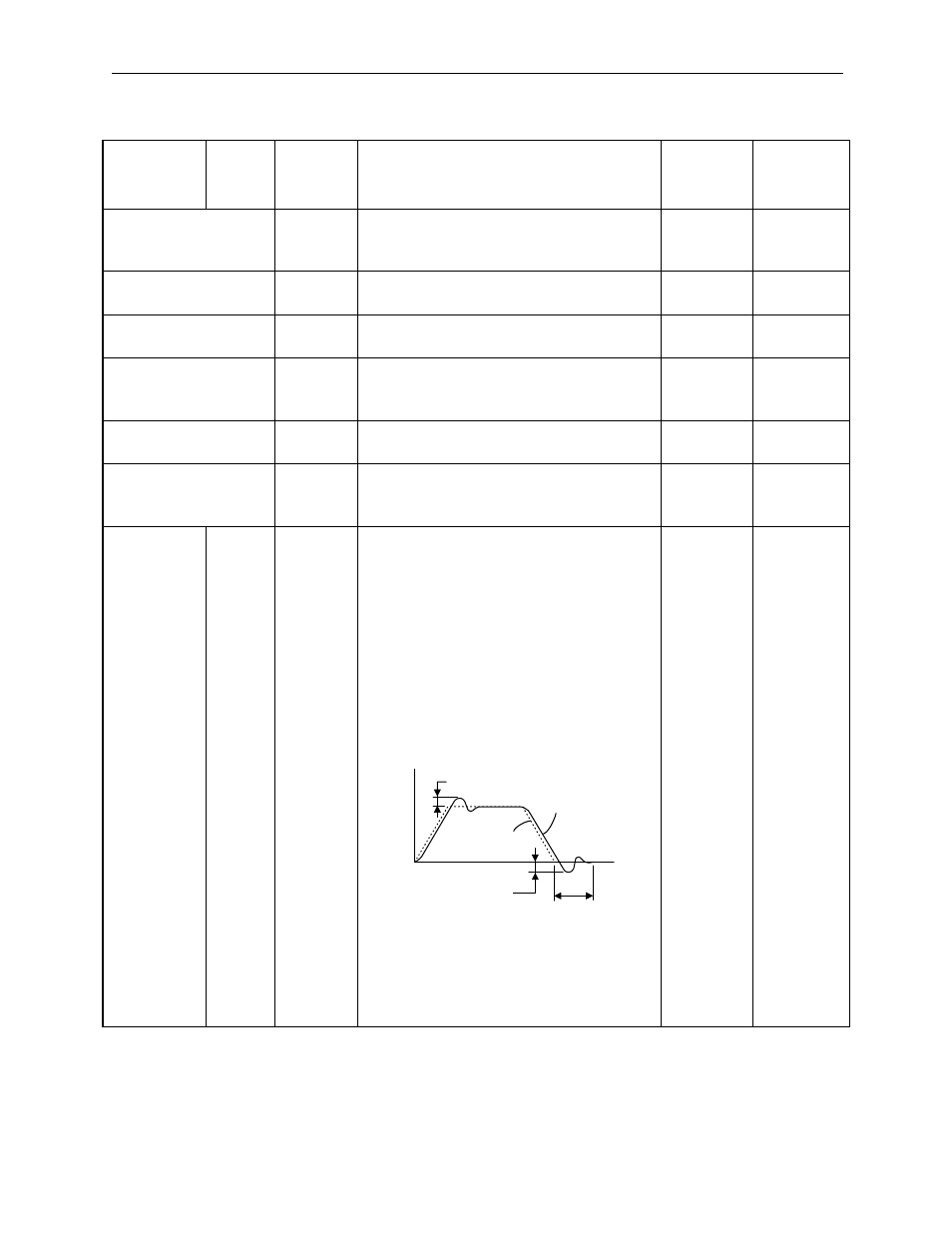
The mode switch function automatically
switches the speed control mode within the
servo amplifier from PI Control to P Control
while given conditions are established. The
mode switch function is used in the follow-
ing situations:
Suppressing accel/decel overshoot in
speed control.
Suppressing undershoot during position-
ing operation and reducing settling time in
position control.
Mode Switch Selection
The following four mode switches can be
selected for this servo amplifier. Select
with the following user parameter
(Pn10B.0).
0
Speed
Torque
Position
Gain Related Parameters (Continued)
User
Parameter
Number
Digital
Position
Name
(setting
range)
Content
Default
Setting
Control
Mode
Actual Motor
Operation
Overshoot
Speed
Reference
Settling
Time
Time
Undershoot