Yaskawa MP940 Reference Manual User Manual
Page 234
Parameter Details
MotionSuite™ MP940 Machine Controller Reference Manual
6-34
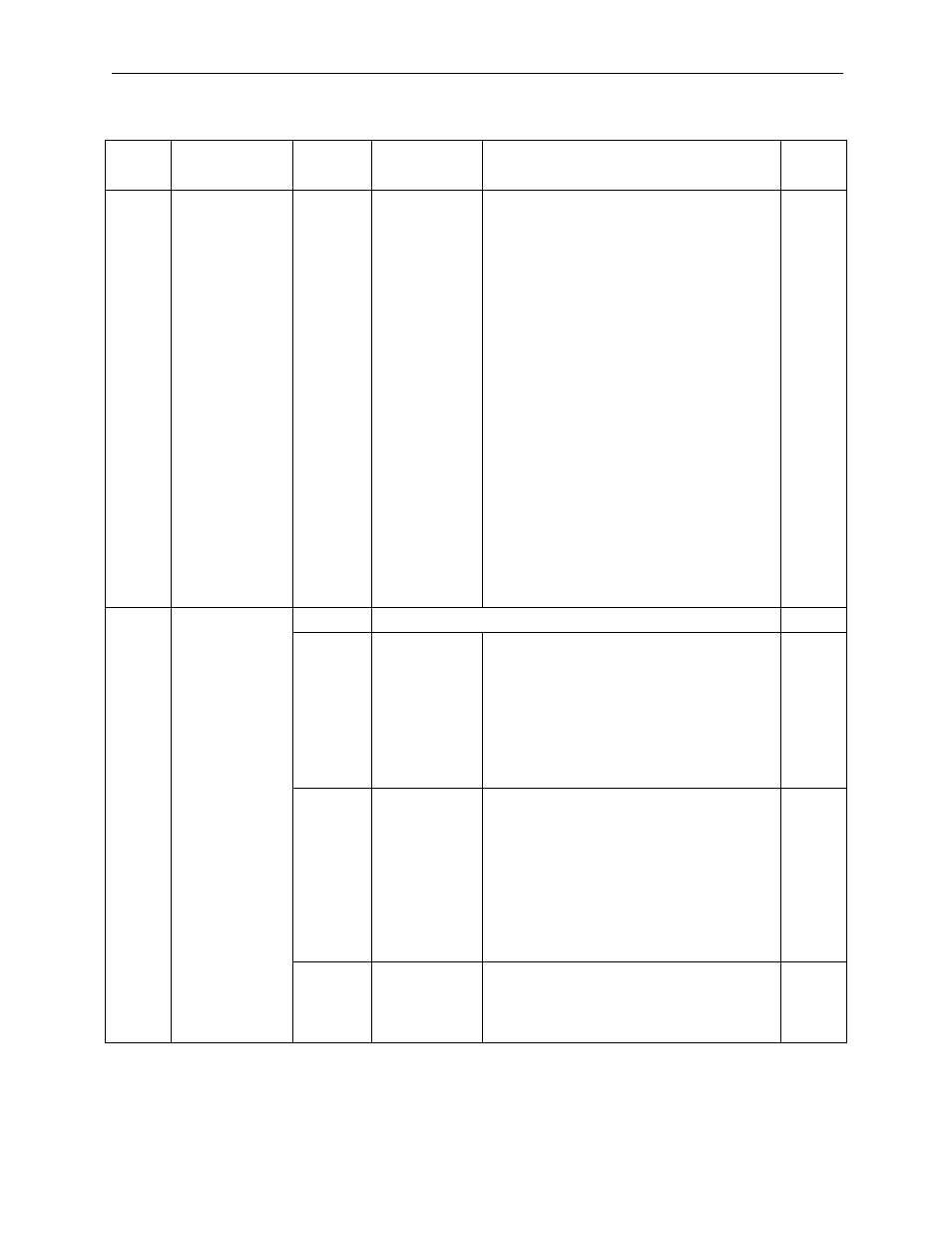
33
Motion
Command
Code
OWC020
0 ~ 65535
Sets motion commands into the MP940
module.This can be used under the fol-
lowing conditions:
Motion Command Use Selection
(bit 7 of fixed parameter No. 14)
Position Control Mode Selection
(ObC0002)
Enable Operation Mode Setting Motion
Command
(ObC0008)
Motion Command Types0:NOP(no command)
1: Positioning (POSING)
2: External Positioning (EX-POSING)
3: Zero-point Return (ZRET)
4: Interpolation (INTERPOLATE)
5: Unusable (used by system)
6: Interpolation with Position Detection Func-
tion (LATCH)
7: Set Speed Feed (FEED)
8: Stepping (STEP)
9: Zero-point Setting (ZSET)
10 ~ 65535: Unused
0
34
Motion
Command
Options
OWC021
Sets the motion command supplemental function.
—
Bit 0
Command Hold
(HOLD)
The axis decelerates to stop if this bit
goes ON during operation with the motion
command code (OWC020) in positioning
or stepping. Hold Complete (IBC0151)
goes ON when holding is complete. The
hold is released, and the positioning oper-
ation restarted if this bit is returned to OFF
in this state.
—
Bit 1
Abort
Command
(ABORT)
The axis decelerates to stop if this bit
goes ON during operation with the motion
command code (OWC020) in positioning,
zero-point return, or stepping.
BUSY (IBC0150) goes ON during abort
processing, and OFF at abort completion.
The same function can be executed when
aborting during fixed speed feed by mak-
ing NOP the motion command.
0
Bit 2
Direction of
Motion
(DIRECTION)
Designates the motion direction.
Motion command (OWC020) is enabled
during set speed feed and stepping.
0:Forward 1:Reverse
0 (For-
ward)
Other Command/Mode Settings (Continued)
Number
Name
Register
Number
Setting Range
Content
Default
Value